Mars 2020 è una missione spaziale per l'esplorazione di Marte che è stata sviluppata dalla NASA, il cui lancio è avvenuto con successo il 30 luglio 2020[3] ed il suo arrivo sulla superficie di Marte ha avuto altrettanto esito positivo il giorno 18 febbraio 2021 alle ore 21:55 CET.[7][11] La missione è incentrata principalmente sull'invio di Perseverance sulla superficie di Marte, un rover derivato dal predecessore Curiosity per ridurre i costi, a cui sono state applicate diverse migliorie.[5] Oltre al rover c'è un piccolo elicottero dimostrativo chiamato Ingenuity.
Gli obiettivi primari della missione consistono nello studiare l'abitabilità di Marte, nell'investigare il suo passato e cercare tracce di eventuale vita biologica. Si prevede, inoltre, lo stoccaggio di campioni geologici per consentire alla futura missione Mars Sample Return di portarli sulla Terra col fine di analizzarli accuratamente.[6][12]
La missione Mars 2020 fa parte del programma di esplorazione Mars Exploration Program della NASA, che include, oltre a Curiosity, le due sonde Mars Odyssey e Mars Reconnaissance Orbiter attualmente in orbita attorno al pianeta, e l'orbiter MAVEN che è arrivato su Marte nel mese di settembre 2016 e ne studierà l'alta atmosfera.
A maggio 2018 è stato lanciato un lander chiamato InSight per dare un primo sguardo all'interno profondo del pianeta.
Gli obiettivi principali prefissati dalla NASA sono quattro:[13]
Determinare se la vita sia mai esistita su Marte: la missione del rover Perseverance si concentra su degli studi della superficie marziana in cerca di tracce di vita microbica preservate sulle rocce che hanno formato l'ambiente marziano in epoca antica.[14]
Definire il clima di Marte: un punto centrale della missione consiste nel ricostruire il passato delle condizioni climatiche di Marte. Gli strumenti del rover cercheranno delle testimonianze di antichi ambienti dove la vita microbica sarebbe potuta esistere nel passato.[15]
Descrivere la geologia marziana: il rover è progettato per studiare le formazioni rocciose con lo scopo di svelare maggiori informazioni sui processi geologici che hanno creato e modificato la crosta e la superficie marziana nel corso del tempo.[16]. Inoltre il rover è progettato per estrarre e stoccare dei campioni di roccia e suolo marziano per una eventuale futura missione che avrà il compito di portarli sulla Terra per analizzarli.[17]
Preparazione per l'esplorazione umana: il rover sarà una dimostrazione scientifica per l'uso delle risorse naturali dell'ambiente marziano. Esso inoltre monitorerà le condizioni ambientali cosicché si possa capire meglio come proteggere gli esploratori umani, inserendosi nel progetto per le future spedizioni umane fissate per il 2030. Le missioni robotiche, similmente a quelle relative alla Luna, forniranno informazioni essenziali di base per meglio affrontare le future esplorazioni umane.[18]. In ultimo il rover testerà la produzione di ossigeno dall'atmosfera marziana ricca di anidride carbonica attraverso il MOXIE.
Secondo la NASA, Mars 2020, essendo il rover basato sul predecessore Curiosity, ha un costo minore: 2,1 miliardi di dollari per lo sviluppo e il lancio della sonda[19] contro i 2,5 del predecessore.[20][21]
Infografica di 5 curiosità scientifiche riguardo alla missione Mars 2020.
I tre componenti principali di Mars 2020 sono: il veicolo spaziale per il viaggio tra la Terra e Marte, costituito da una struttura cilindrica di alluminio del diametro di 4 metri e del peso di 539 kg; il veicolo di rientro atmosferico del peso 575 kg, più 440 kg di scudo termico situato nella parte anteriore, mentre in uno scudo posteriore era situato il paracadute. Il terzo componente principale è il modulo di atterraggio da 1.070 kg che trasportava 400 kg di propellente e dotato di otto motori a razzo per l'atterraggio morbido, oltre a otto piccoli motori per il controllo di assetto durante la discesa finale.
Il Range Trigger è il sistema che controlla la tempistica dell'apertura dei paracadute durante la discesa. Conoscendo la propria posizione rispetto al sito di atterraggio previsto e ritardando o anticipando l'apertura dei paracadute è stato possibile ridurre del 50% l'ellisse di atterraggio, ovvero l'area stimata di arrivo, riducendo quindi i rischi di trovarsi in aree impervie o di scarso interesse.[5][22]
Il Terrain-Relative Navigation è invece un inedito sistema di determinazione delle caratteristiche del suolo nelle ultimissime fasi dell'atterraggio.
Il computer che ha governato questa fase di missione ha avuto pre-caricata una mappa in alta risoluzione del sito di atterraggio, realizzata negli anni precedenti dalle sonde attualmente in orbita marziana e contenente a sua volta tutte le aree pericolose o sconsigliate per l'atterraggio. Durante la discesa il rover ha raccolto immagini in rapida successione della zona che ha sorvolato e confrontandole con la mappa conosciuta ha calcolato la sua posizione e la zona di arrivo stimata.[5][22]
Sempre nella fase di discesa è stata attiva anche la suite di strumenti MEDLI2, ovvero la seconda generazione della suite MEDLI, (MSL Entry, Descent and Landing Instrumentation) che ha raccolto dati quali pressione e temperatura atmosferica e dello scudo termico, permettendo di caratterizzare maggiormente l'atmosfera marziana per le future missioni. Durante l'atterraggio sono state attive diverse telecamere, permettendo di riprendere tutte le fasi dell'atterraggio: una telecamera ha ripreso i paracadute, una il suolo in basso sullo stadio di discesa, una era puntata in alto verso lo stadio di discesa e un'altra verso il suolo. È presente anche un microfono che ha raccolto i suoni durante tutte le fasi.[5][22]
Carico scientifico per la missione del rover Perseverance.
Il rover è basato sull'impronta e struttura di Curiosity,[5] ed è infatti dotato di un generatore termoelettrico a radioisotopi (MMRTG)[23][24], ovvero un generatore di calore ed energia elettrica, basato sul decadimento radioattivo del plutonio, per alimentare e riscaldare il rover, in quanto la temperatura media sulla superficie di Marte è −63 °C[25]. Il generatore la riserva rimasta per Curiosity, ha un peso di 45 kg e la potenza elettrica generata è di circa 110 watt al momento del lancio con una lieve diminuzione nel corso della missione. Sono incluse due batterie ricaricabili agli ioni di litio per soddisfare le richieste di picco delle attività del rover quando la domanda supera temporaneamente i livelli di uscita elettrica stabili del MMRTG. L'MMRTG offre una durata operativa di 14 anni ed è stato fornito alla NASA dal Dipartimento dell'Energia degli Stati Uniti.[26]
Rispetto a Curiosity, però, il rover è stato dotato di un sistema di atterraggio perfezionato. In particolare ha potuto contare su due evoluzioni, il "Range Trigger" e il "Terrain-Relative Navigation".
Essendo simile a Curiosity e condividendo lo stesso hardware, Perseverance è stato progettato con l'aiuto degli stessi ingegneri della precedente missione su Marte.[27] Sono state riprogettate le ruote di Perseverance per renderle più robuste di quelle di Curiosity, le quali, dopo chilometri sulla superficie marziana, hanno mostrato un progressivo deterioramento.[28]Perseverance ha ruote in alluminio più spesse e durevoli, con larghezza ridotta e diametro maggiore, 52,5 cm, rispetto alle ruote da 50 cm di Curiosity.[29]
Il rover porta con sé sette strumenti scelti in una selezione fra 58 proposte,[9][10] 23 fotocamere tra cui: 9 cosiddette ingegneristiche, 7 scientifiche e ulteriori 7 adibite per la fase di discesa e atterraggio sul suolo marziano[30]. È inoltre dotato di due microfoni per registrare il suono ambientale durante la discesa, l'atterraggio e il funzionamento del rover sul suolo[31]. La massa complessiva ammonta a circa 29 kg mentre l'assorbimento massimo (cioè nel caso in cui tutti gli strumenti venissero azionati in contemporanea) è di 436 W.[9][10] Il costo totale dello sviluppo della strumentazione scientifica ammonta a circa 130 milioni di dollari.[20][21]
Supercam:Illustrazione del funzionamento della Supercam: vaporizza la roccia con un raggio laser da una distanza di 7 metri per poi analizzarne la composizione tramite uno spettrometro. è uno strumento LIBS (Laser Induced Breakdown Spectroscopy), evoluzione della ChemCam montata su Curiosity, che potrà fornire immagini e l’analisi chimica della composizione mineralogica a distanza di 7 m dal sito, analizzando quindi quei posti che rover non potrebbe raggiungere con il braccio meccanico.[34].
PIXL (Planetary Instrument for X-Ray Lithochemistry): spettrometro a fluorescenza X con inclusa una fotocamera ad alta risoluzione, montata alla fine del braccio robotizzato in modo tale da essere posizionato vicino al suolo o su una roccia, verrà utilizzato per determinare con precisione gli elementi che compongono i campioni analizzati.[5].
SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals): montato come il PIXL sul braccio robotico, è uno spettrometro Raman a ultravioletti accompagnato da una fotocamera per la ricerca di composti organici e minerali[35].[36]. Lo strumento pesa 4,72 kg e ha un assorbimento di 48,8 W[35].
MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment): è uno strumento per la dimostrazione scientifica dell'estrazione, in condizioni locali, di ossigeno (O2) dall'anidride carbonica (CO2) che compone quasi esclusivamente l'atmosfera marziana[37].[38]. Il MOXIE pesa non più di 1,8 kg[39] e ha un assorbimento di 300 W[40].
MEDA (Mars Environmental Dynamics Analyzer): set di sensori che forniscono misurazioni di temperatura, velocità e direzione del vento, pressione, umidità relativa e forma e dimensione del pulviscolo in sospensione nell’atmosfera.[5][41]. Lo strumento è realizzato dal Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial (CSIC-INTA) in Spagna. Il Meda pesa circa 5,5 kg e ha un assorbimento fino a 17 W[42].
RIMFAX (The Radar Imager for Mars’ subsurFAce eXploration): radar in grado di rilevare la struttura del suolo marziano. Il diagramma che si ottiene dal segnale di ritorno è simile a un'ecografia. Il segnale varia a seconda se è presente ghiaccio, rocce, sabbia o acqua.[43] Il radar opera tra le frequenze di 150 MHz e 1,2 GHz, esso sarà in funzione durante gli spostamenti del rover per raccogliere man mano dati del suolo marziano. Le aspettative sono quelle di riuscire a "penetrare" fino a 10 metri di profondità. L'obiettivo è quello di riuscire a mappare il sottosuolo nelle vicinanze del sito d'atterraggio e nei dintorni di un eventuale campione di roccia prelevato.[44] Il radar pesa meno di 3 kg e ha un assorbimento fino a 10 W.[43]
MHS (Ingenuity) è un piccolo elicottero con una massa di 1,8 kg, che è stato il primo velivolo più pesante dell'atmosfera a volare su un altro pianeta. Una volta atterrato con il rover, il suo obiettivo era di compiere nell'arco di 30 giorni dei test di volo della durata di 90 s.[45]
Dispone di due telecamere ad alta risoluzione per la navigazione, ma non ha strumenti scientifici a bordo.
Dopo alcuni ritardi[46], il lancio è avvenuto con successo il 30 luglio 2020 alle ore 7:50 EDT (13:50 ora italiana), a bordo di un razzo Atlas V 541.[3][47] Dopo circa 56-60 minuti e raggiunta la velocità di 11/km/s, il veicolo spaziale si è separato dallo stadio Centaur.
Animazione della traiettoria di Mars 2020 dal 30 luglio 2020 al 20 Febbraio 2021
Mars 2020
Sole
Terra
Marte
Durante il tragitto verso Marte, durato 7 mesi, sono state controllati i sottosistemi e gli strumenti, inoltre sono state effettuate alcune correzioni di traiettoria previste, la prima per correggere un errore di traiettoria intenzionale per evitare che lo stadio Centaur, non sufficientemente sterilizzato, potesse incidentalmente raggiungere Marte e schiantarsi sulla superficie, col rischio di contaminazione del pianeta. Negli ultimi 45 giorni prima dell'arrivo, erano previste un paio di manovre di correzione per la scelta precisa del punto di atterraggio desiderato.[48]
L'atterraggio del rover è stato pianificato in modo simile a quello del Mars Science Laboratory utilizzato per rilasciare Curiosity su Marte nel 2012. Il veicolo proveniente dalla Terra era una capsula in fibra di carbonio che proteggeva il rover e altre apparecchiature dal calore durante l'ingresso nell'atmosfera di Marte. Una volta attraversata l'atmosfera è stato espulso lo scudo termico inferiore e si è aperto un paracadute per rallentare la discesa a una velocità controllata. Con il veicolo che si muoveva a una velocità inferiore a 320 km/h e a circa 1,9 km dalla superficie, il modulo di discesa contenente il rover e una gru volante (in inglese sky crane) si sono staccati dal guscio posteriore e i retrorazzi hanno controllato la restante discesa verso il pianeta. Quando la gru si è avvicinata alla superficie, ha abbassato Perseverance tramite i cavi fintanto che non è stato confermato l'atterraggio, dopodiché i cavi si sono staccati e il modulo di discesa è volato a una certa distanza di sicurezza per evitare di danneggiare il rover.[49]
Il rover Perseverance è atterrato nel cratere Jezero alle 21:55 CET del 18 febbraio 2021.[7] La notizia dell'atterraggio è stata data da Swati Mohan, ingegnera aerospaziale responsabile delle operazioni di guida e controllo della missione.[50][51]
18 febbraio 2021 – Atterraggio di Perseverance sulla superficie di Marte
4 marzo 2021 – Primo test delle funzioni di guida di Perseverance
3 aprile 2021 – Rilascio di Ingenuity
3-4 aprile 2021 - Mars Environmental Dynamics Analyser (MEDA) ha registrato il primo bollettino meteorologico su Marte
19 aprile 2021 – Primo volo di Ingenuity
20 aprile 2021 - Il MOXIE ha prodotto 5,37 g di ossigeno dall'anidride carbonica dall'atmosfera marziana durante il suo primo test su Marte.
1 giugno 2021 – Perseverance inizia la sua prima campagna scientifica.
8 giugno 2021 – Settimo volo di Ingenuity.
21 giugno 2021 – Ottavo volo di Ingenuity. Risolo un problema ricorrente, chiamato "watchdog", che a volte impediva al drone di innalzarsi in volo.
5 luglio 2021 – Nono volo di Ingenuity. Questo volo è il primo ad esplorare aree che solo un veicolo aereo può fare, prendendo una scorciatoia sopra la zona chiamata Séítah. Le increspature sabbiose si sarebbero rivelate troppo difficili da attraversare direttamente per Perseverance.[52]
6 agosto 2021 – Perseverance ha acquisito il suo primo campione dall'antico fondale del lago.[91]
3 maggio 2022 – Dopo 27 voli i Ingenuity, il rover ha perso il contatto con l'elicottero e le operazioni scientifiche sul rover sono state interrotte per riprendere i contatti col drone. Successivamente la NASA è riuscita a ristabilire il contatto e a riprendere i voli.
25 gennaio 2024 – La NASA annuncia la fine della missione di Ingenuity. Gli ingegneri hanno scoperto che l'elicottero ha subito danni dopo un blackout delle comunicazioni con Perseverance, vicino alla zona dell'atterraggio del volo 72. Le foto scattate da Ingenuity hanno mostrato che una o più pale del rotore erano danneggiate, con conseguente decisione di terminare la missione dimostrativa di Ingenuity.[53]
Come la missione InSight,[54] la NASA ha proposto una iniziativa mediatica per coinvolgere il pubblico appassionato: la sonda è stata dotata di microchip con incisi i nomi delle persone che hanno partecipato all'iniziativa: tramite la compilazione di un form era possibile far aggiungere il proprio nome ricevendo una sorta di carta di imbarco con lo stemma ufficiale della missione. Dopo aver registrato i propri nomi, i partecipanti hanno ricevuto un biglietto digitale con i dettagli del lancio e della destinazione della missione.[55] Durante il periodo di registrazione sono stati presentati 10.932.295 nomi. Inoltre, la NASA ha annunciato nel giugno 2019 che nell'autunno del 2019 si sarebbe tenuto un concorso studentesco per il nome del rover, con la votazione sui nove nomi finalisti che si sarebbe tenuta nel gennaio 2020. Perseverance è stato annunciato come il nome vincitore il 5 marzo 2020.[56]
Come da consuetudine, sono stati posti vari abbellimenti e tributi sulla sonda, tra i quali una piccola targa di alluminio su Perseverance per commemorare l'impatto della pandemia di COVID-19 e rendere "omaggio alla perseveranza degli operatori sanitari di tutto il mondo". Sulla targa è rappresentata la Terra sopra il bastone di Asclepio, con una linea che mostra la traiettoria della navicella spaziale Mars 2020 in partenza dalla Terra.[57]
La NASA ha diffuso pubblicamente i momenti della discesa e dell'atterraggio di Perseverance sul suolo marziano, con Swati Mohan, ingegnere aerospaziale della NASA di origini indiane, che ha annunciato in diretta l'avvenuto atterraggio.[58]
Rappresentazione del funzionamento del Range-Trigger
Rappresentazione del "Adaptive-caching" ovvero della raccolta dei campioni rocciosi. Le linee continue rappresentano gli spostamenti della missione primaria, quelle tratteggiate invece un'eventuale missione secondaria
^nei 2,1 miliardi ci sono circa 130 milioni per lo sviluppo della strumentazione scientifica. Ai 2,1 miliardi vanno aggiunti circa 250 milioni per le operazioni durante la missione primaria.









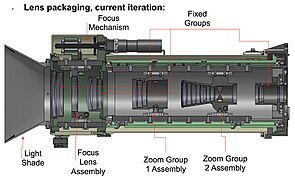 Illustrazione della struttura della Mastcam-Z
Illustrazione della struttura della Mastcam-Z Diagramma d'esempio ottenuto dalle elaborazioni del PIXL
Diagramma d'esempio ottenuto dalle elaborazioni del PIXL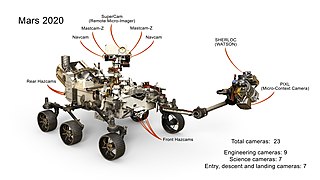 Fotocamere a bordo
Fotocamere a bordo Testa del rover, sono facilmente individuabili le fotocamere e inferiormente le sporgenze dove sono alloggiati i sensori del MEDA
Testa del rover, sono facilmente individuabili le fotocamere e inferiormente le sporgenze dove sono alloggiati i sensori del MEDA Rappresentazione artistica del RIMFAX
Rappresentazione artistica del RIMFAX Rappresentazione artistica del Mars Helicopter Scout
Rappresentazione artistica del Mars Helicopter Scout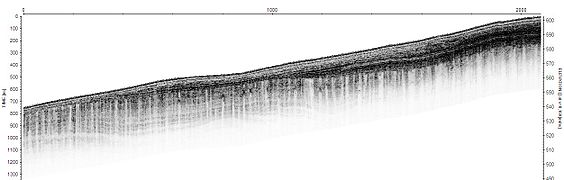 Diagramma d'esempio ottenuto dal "radar" RIMFAX
Diagramma d'esempio ottenuto dal "radar" RIMFAX



.jpg)






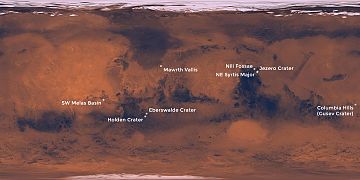 Selezione dei possibili luoghi d'atterraggio
Selezione dei possibili luoghi d'atterraggio Rappresentazione del funzionamento del Range-Trigger
Rappresentazione del funzionamento del Range-Trigger Rappresentazione del "Adaptive-caching" ovvero della raccolta dei campioni rocciosi. Le linee continue rappresentano gli spostamenti della missione primaria, quelle tratteggiate invece un'eventuale missione secondaria
Rappresentazione del "Adaptive-caching" ovvero della raccolta dei campioni rocciosi. Le linee continue rappresentano gli spostamenti della missione primaria, quelle tratteggiate invece un'eventuale missione secondaria


 INAF, Gli ultimi 13 centimetri di Ingenuity, su YouTube, 25 giugno 2020.
INAF, Gli ultimi 13 centimetri di Ingenuity, su YouTube, 25 giugno 2020.
 Wikimedia Commons contiene immagini o altri file su Perseverance
Wikimedia Commons contiene immagini o altri file su Perseverance