Ala a geometria variabile
Un'ala a geometria variabile è un tipo di ala che può variare l'angolo di freccia durante il volo.





Di solito, l'ala ritratta è maggiormente adatta per volare ad alte velocità, mentre quella estesa è migliore per le velocità più basse, permettendo all'aeroplano anche di portare più carburante e carico. L'ala a geometria variabile dà quindi al velivolo la possibilità di avere le migliori prestazioni a qualunque velocità ed è dunque più utile per quegli aerei che devono operare sia ad alte che a basse velocità: per questo è stata utilizzata soprattutto per gli aerei militari.
Storia[modifica | modifica wikitesto]
I primi aeroplani sperimentali a geometria variabile delle ali dovevano solo studiare gli effetti dell'ala ritratta durante il volo. Il primo di questi fu il Messerschmitt P.1101, il cui angolo di freccia poteva essere cambiato a terra. La seconda guerra mondiale, però, finì prima che il P.1101 fosse completato.
Poco dopo, il P.1101 fu portato negli Stati Uniti dove fu studiato dalla Bell Aircraft, ma, mancando le documentazioni ed essendo presenti danni strutturali, la Bell rinunciò a completarlo. Al suo posto si costruì un aereo che poteva cambiare la geometria alare in volo. Un problema scoperto durante i test del Bell X-5 fu che mentre le ali si muovevano all'indietro, anche la forza di portanza faceva la stessa cosa, e l'aereo si ritrovava con il muso puntato verso il basso. Un sistema che compensasse questo effetto dovette essere aggiunto.
Subito dopo la guerra Barnes Wallis aveva cominciato a lavorare sull'ala a geometria variabile per massimizzare le prestazioni dei voli supersonici. I primi lavori furono sul progetto militare Wild Goose, poi si trasferirono nel Vickers Swallow, che avrebbe dovuto eseguire un volo dall'Europa all'Australia in 10 ore. Esso aveva una forma a fusoliera integrata e non aveva coda. Negli anni 1950 Wallis eseguì dei voli a Mach 2 con un modello in scala lungo sei piedi, ma i finanziamenti governativi furono ritirati. Wallis e la sua squadra presentarono il loro lavoro agli USA trovando modo di continuare il loro lavoro, ma non si arrivò a nulla.[1] Nel 1949, L. E. Baynes, un ingegnere aeronautico e progettista della Baynes Bat, produsse un progetto di caccia supersonico a geometria alare variabile, che non fu però mai costruito.
Un'ala a geometria variabile fu provata sul Grumman F10F Jaguar nel 1952. L'XF10F non entrò mai in servizio, poiché aveva caratteristiche di volo insoddisfacenti. L'idea ritornò all'inizio degli anni 1960 come modo per conciliare un grande carico alare con buone prestazioni di decollo ed atterraggio. Gli Stati Uniti adottarono questa configurazione per il programma TFX (Tactical Fighter Experimental - caccia tattico sperimentale) che sfociò nel General Dynamics F-111, il primo aereo a geometria alare variabile entrato in servizio.
Richieste simili erano quelle avanzate dall'ufficio sovietico per l'aerodinamica, lo TsAGI, ad esplorare le possibilità della geometria variabile. Lo TsAGI creò due tipi di superfici alari che differivano soprattutto nella distanza espressa in percentuale dell'apertura alare totale tra i perni delle ali. Uno spazio più largo non solo riduceva gli effetti aerodinamici negativi del cambiamento dell'apertura alare, ma prevedeva anche una sezione dell'ala più grande che poteva essere utilizzata per i carrelli d'atterraggio e i piloni. Questo tipo di ala fu quello utilizzato sui Sukhoi Su-17 e sui Tupolev Tu-22M. La distanza più larga aveva però un difetto: riduceva i benefici dell'ala a geometria variabile. Per i nuovi progetti, lo TsAGI sviluppò una superficie alare con minore distanza tra i perni, simile a quella dell'F-111. Questo tipo d'ala fu utilizzata per il caccia MiG-23 e per l'interditore Sukhoi Su-24, il cui prototipo cominciò a volare alla fine degli anni 1960, entrando in servizio all'inizio degli anni 1970.
Dopo la cancellazione del progetto BAC TSR-2, il Regno Unito iniziò un programma con la Francia per la creazione dell'AFVG (Anglo-French Variable Geometry aircraft - aereo a geometria variabile anglo-francese). Ridotto il finanziamento francese, il Regno Unito cercò un partner di secondo livello all'interno del consorzio europeo per l'F-104. Tutto ciò portò il consorzio europeo ad adottare la geometria variabile delle ali sul progetto MRCA (Multi-Role Combat Aircraft - aeroplano da combattimento multiruolo) che divenne infine il Panavia Tornado,[2] aereo da interdizione e intercettazione simile come funzioni all'F-111, seppur più piccolo.
Nel frattempo, la U.S. Navy fece entrare in servizio il caccia imbarcato Grumman F-14 Tomcat, più agile dell'F-4 Phantom dopo la cancellazione della versione imbarcata dell'F-111 (l'F-111B) giudicata troppo pesante per poter operare su portaerei. A differenza dell'F-111, le ali modificavano la loro geometria automaticamente, dipendentemente dalla velocità. Durante il combattimento, le ali potevano essere ritratte per effettuare particolari manovre.[3][4]
Aerei[modifica | modifica wikitesto]
Sperimentali[modifica | modifica wikitesto]
Produzione in serie[modifica | modifica wikitesto]
 General Dynamics EF-111 Raven
General Dynamics EF-111 Raven- General Dynamics F-111
- Grumman F-14 Tomcat
 Mikoyan-Gurevich MiG-23
Mikoyan-Gurevich MiG-23- Mikoyan-Gurevich MiG-27
 Panavia Tornado
Panavia Tornado- Rockwell B-1 Lancer
- Sukhoi Su-17
- Sukhoi Su-24
- Tupolev Tu-22M
- Tupolev Tu-160
Galleria d'immagini[modifica | modifica wikitesto]
-
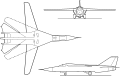 Tavole prospettiche del cacciabombardiere General Dynamics F-111
Tavole prospettiche del cacciabombardiere General Dynamics F-111 -
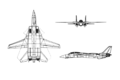 Tavole prospettiche del caccia imbarcato Grumman F-14 Tomcat
Tavole prospettiche del caccia imbarcato Grumman F-14 Tomcat -
 Tavole prospettiche del bombardiere strategico Rockwell B-1 Lancer
Tavole prospettiche del bombardiere strategico Rockwell B-1 Lancer -
 Tavole prospettiche del cacciabombardiere Mikoyan-Gurevich MiG-23MF "Flogger B"
Tavole prospettiche del cacciabombardiere Mikoyan-Gurevich MiG-23MF "Flogger B" -
 Tavole prospettiche di un cacciabombardiere Panavia Tornado
Tavole prospettiche di un cacciabombardiere Panavia Tornado -
 Tavole prospettiche del cacciabombardiere Sukhoi Su-17
Tavole prospettiche del cacciabombardiere Sukhoi Su-17 -
 Tavole prospettiche di un bombardiere Sukhoi Su-24
Tavole prospettiche di un bombardiere Sukhoi Su-24 -
 Tavole prospettiche del bombardiere strategico Tupolev Tu-22M
Tavole prospettiche del bombardiere strategico Tupolev Tu-22M -
 Tavole prospettiche del bombardiere strategico Tupolev Tu-160
Tavole prospettiche del bombardiere strategico Tupolev Tu-160









Note[modifica | modifica wikitesto]
- ^ (EN) The Barnes Wallis Memorial Trust (archiviato dall'url originale il 6 aprile 2007).
- ^ Buttler, Tony British Secret Projects: Jet Bombers Since 1949.
- ^ (EN) Copia archiviata, su 209.196.57.95. URL consultato il 21 aprile 2010 (archiviato dall'url originale il 4 aprile 2009). F-14D Tomcat vs. F/18 E/F Super Hornet Flight Journal Magazine February 2002 Issue Bob Kress and RADM Gilchrist USNRet "dedicated air combat occurs at below about 0.8 because of high turning drag – an arena in which the F-14's 20-degree sweep is optimal... it has only 36 percent of the F-14's payload/range capability.
- ^ Fact file: F-14 Tomcat.
Altri progetti[modifica | modifica wikitesto]
 Wikimedia Commons contiene immagini o altri file su Ala a geometria variabile
Wikimedia Commons contiene immagini o altri file su Ala a geometria variabile