Approssimazione per angoli piccoli

L'approssimazione per angoli piccoli consiste nel semplificare le funzioni trigonometriche di base a funzioni più semplici quando l'angolo è molto piccolo e tende a zero. L'approssimazione si basa sugli sviluppi di Taylor-MacLaurin troncati al secondo ordine. Si ha:[1][2]

dove è l'angolo in radianti.

Questa approssimazione è utile in molti ambiti di fisica e di ingegneria, tra cui meccanica, elettromagnetismo, ottica, e così via.
Spiegazione[modifica | modifica wikitesto]
Grafica[modifica | modifica wikitesto]
-
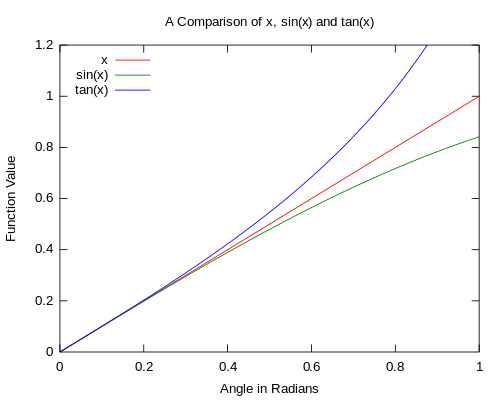 Figura 1. Paragone tra le funzioni trigonometriche dispari. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
Figura 1. Paragone tra le funzioni trigonometriche dispari. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0. -
 Figura 2. Paragone tra la funzione coseno e la funzione 1- θ^2/2. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
Figura 2. Paragone tra la funzione coseno e la funzione 1- θ^2/2. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.


Geometrica[modifica | modifica wikitesto]

La parte in rosso, , è la differenza tra l'ipotenusa e il cateto Questa differenza è piccola e, poiché , si ha che il coseno è molto vicino a 1 e più precisamente





L'altro cateto, , è circa uguale all'arco in blu, . Per la definizione di radiante, si ha



Poiché inoltre

e dalla figura è facile notare come e , si giunge dunque alla seguente conclusione.



Algebrica[modifica | modifica wikitesto]

Gli sviluppi in serie di MacLaurin delle funzioni trigonometriche sono i seguenti:[3]



Nel primo caso, si nota che già il secondo termine decresce come il cubo del primo; quindi per valori abbastanza vicini a zero, come 0,01, il secondo termine e i successivi diventano molto piccoli, quindi trascurabili:

Pertanto, il seno di un angolo piccolo può essere approssimato al primo termine, cioè all'angolo stesso. Lo stesso ragionamento può essere applicato anche al coseno e alla tangente; ne segue che il coseno di un angolo piccolo è circa 1 e la tangente, rapporto tra seno e coseno, per angoli piccoli si comporta come il rapporto tra un angolo e 1; in conclusione, si hanno le seguenti equivalenze asintotiche:

Analisi[modifica | modifica wikitesto]
Si può dimostrare, con il teorema del confronto, che[4]

Allora si può dire che, per :


Le precedenti approssimazioni si possono esprimere anche come

Errori nell'approssimazione[modifica | modifica wikitesto]

La figura 3 mostra gli errori relativi dovuti a questa approssimazione. Gli angoli ai quali l'errore relativo supera l'1% sono i seguenti:

Utilizzi specifici[modifica | modifica wikitesto]
Moto di un pendolo[modifica | modifica wikitesto]
L'approssimazione del seno consente di semplificare il calcolo del periodo di un pendolo semplice. Ciò rende il moto del pendolo un moto armonico semplice.
Note[modifica | modifica wikitesto]
- ^ (EN) Charles H. Holbrow e al., Modern Introductory Physics, 2ª ed., Springer Science & Business Media, 2010, pp. 30-32, ISBN 0387790799.
- ^ (EN) Micheal Plesha et al., Engineering Mechanics: Statics and Dynamics, 2ª ed., McGraw-Hill Higher Education, 2012, p. 12, ISBN 0077570618.
- ^ (EN) Mary L. Boas, Mathematical Methods in the Physical Sciences, Wiley, 2006, p. 26, ISBN 978-0-471-19826-0.
- ^ (EN) Ron Larson et al., Calculus of a Single Variable: Early Trascendental Functions, 4ª ed., Cengage Learning, 2006, p. 85, ISBN 0618606254.
Bibliografia[modifica | modifica wikitesto]
- Tom Apostol, Calcolo 1, 9ª ed., Bollati Boringhieri, 1987 [1977], ISBN 88-339-5033-6.
Collegamenti esterni[modifica | modifica wikitesto]
- (EN) Taylor Series in MathWorld